
産学連携ニュース
名古屋大学コンソーシアムが、路車協調プラットフォームを無償公開












- TOP
- >
- 名古屋大学コンソーシアムが、路車協調プラットフォームを無償公開
東北地方太平洋沖地震の寄付サイト一覧
記事検索



アクセスランキング トップ10
特集
お問い合わせ
2026年5月20日 17:00
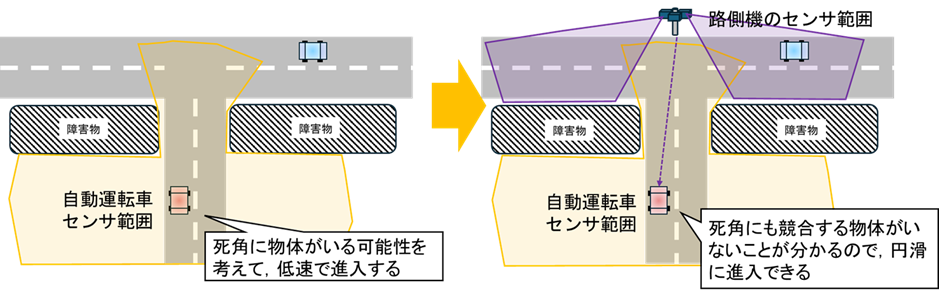
死角をなくす自動運転で、自動運転の社会実装を後押し
これまで、「死角」が課題とされてきた一般道における自動運転の安全性を高めるとともに、バラバラだった通信仕様を共通化することで、自動運転の社会実装を後押しする。ダイナミックマップ2.0は、車両、路側機、クラウドをつなぎ、情報連携を支援する情報通信基盤で、内閣府の戦略的イノベーション創造プログラム・自動走行システム(SIP-adus)のプロジェクト内で重点分野の一つ。
路側機に搭載されたセンサが提供する物標情報やフリースペース情報、信号機の灯色情報や残り時間、自動運転に必要な高精度道路地図などを扱うことができ、無線方式に依存しない共通インターフェースを提供する。
情報仕様を共通化することで、インフラ側のソフトウェア開発を効率化し、自治体や事業者における協調型自動運転の導入コスト低減に寄与する。
・ソフトウェア配布元
プロジェクト名:Dynamic Map 2.0 Platform
URL: https://github.com/dm20-consortium/dm20
ライセンス形態:MITライセンス
(坂土直隆)

-->
産学連携 新着30件